Budidaya ikan lele merupakan salah satu sektor perikanan yang memiliki potensi besar untuk dikembangkan di Indonesia. Ikan lele (Clarias sp.) terkenal karena ketahanannya terhadap kondisi lingkungan yang beragam serta kemampuan pertumbuhannya yang cepat, sehingga menjadi pilihan populer di kalangan petani ikan. Menurut data dari Badan Pusat Statistik (BPS), produksi ikan lele di Indonesia terus meningkat dari tahun ke tahun, mencerminkan tingginya permintaan domestik maupun peluang ekspor yang menjanjikan .
Namun, meskipun memiliki keunggulan tersebut, budidaya ikan lele menghadapi berbagai tantangan yang signifikan. Masalah seperti fluktuasi kualitas air, penanganan pakan yang kurang efisien, serta pengendalian penyakit seringkali menghambat produktivitas dan keberlanjutan usaha budidaya . Oleh karena itu, diperlukan sistem kontrol yang efektif untuk mengatasi masalah ini, memastikan lingkungan budidaya yang stabil, dan meningkatkan efisiensi operasional.
Perkembangan teknologi di bidang akuakultur telah memungkinkan diterapkannya sistem kontrol otomatis dalam budidaya ikan lele. Sistem kontrol ini mencakup penggunaan sensor untuk memantau parameter lingkungan seperti suhu, dan pH serta dapat mengatur pemberian pakan, aerasi, dan sirkulasi air secara otomatis . Implementasi teknologi ini diharapkan tidak hanya meningkatkan produktivitas, tetapi juga mengurangi dampak lingkungan negatif yang sering dikaitkan dengan praktik budidaya konvensional .
1. Mempelajari
simulasi rangkaian aplikasi kolam ternak lele menggunakan water sensor, touch
sensor, PH sensor, Sensor suhu dan rain sensor.
2. Mempelajari
rangkaian kolam ternak lele otomatis menggunakan water sensor, touch sensor, PH
sensor, Sensor suhu dan rain sensor yang diimplementasikan pada dunia nyata.
3. Memenuhi
tugas akhir modul 4 praktikum mikroprosesor dan mikrokontroler.
1. Water Level Sensor

2. Rain Sensor

3. Touch Sensor

4. PH Sensor

5. Sensor Jarak
(DS18B20)

6. Arduino Uno

7. LCD 2x16

8. Motor Servo

9. Motor Dc

10. Buzzer

11. Baterai

12. Driver Motor L293D

13. Jumper

14. Breadboard

15. Resistor

1.
Arduino
Arduino adalah kit
elektronik atau papan rangkaian elektronik open source yang di dalamnya
terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari
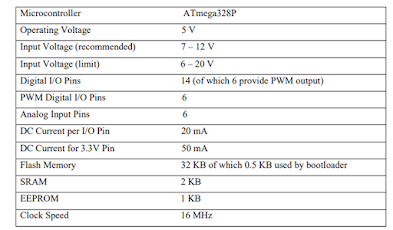
perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino
Uno yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa
menggunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer
ataupun perangkat lain. Adapun spesifikasi dari Arduino Uno ini adalah sebagai
berikut.

A.
Bagian-Bagian Arduino Uno
1.
POWER
USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat
koneksi USB.
2.
POWER
JACK
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 -
12 V. 3. Crystal Oscillator Kristal ini digunakan sebagai layaknya detak
jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16
MHz.
3.
Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
4.
Digital
Pins
I / O Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk
memberikan nilai logika ( 0atau 1 ). Pin berlabel " ~ " adalah
pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan
PWM.
5.
Analog
Pins Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan
untuk membaca sinyalatau sensor analog seperti sensor jarak, suhu dsb, dan
mengubahnya menjadi nilai digital.
6.
LED
Power Indicator Lampu ini akan menyala dan menandakan Papan Arduino
mendapatkan supply listrik dengan baik.
B.
Bagian – Bagian Dalam Pendukung
1.
RAM
RAM (Random Access
Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat
diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam
memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces
Memory) dan DRAM (Dynamic Random Acces Memory).
2.
ROM
ROM (Read-only
Memory) adalah perangkat keras pada computer yang dapat menyimpandata secara
permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dari Mask
ROM, PROM, EPROM, EEPROM.
2.
Water Level Sensor
Water sensor
adalah controller yang bisa mendeteksi volume air, tinggi air, serta
kualitas air di dalam tangki, sungai, danau, dan sejenisnya dengan akurat dan
mudah. Sensor ini merupakan perangkat yang bisa mematikan atau mengobarkan
pompa air secara otomatis andai air mulai berakhir atau sudah nyaris penuh.

Jumlah Pin
pada Sensor ini berjumlah 3 Yaitu :
1. Pin Negatif (-)
2. Pin Positif (+)
3. Pin Data (S)

3.
Sensor PH
pH merupakan suatu parameter yang digunakan untuk
menyatakan tingkat
keasaman atau basa yang dimiliki
oleh suatu zat, larutan atau benda. Kadar pH
diukur pada skala 0 sampai 14.

Dapat
dilihat pada gambar diatas skala pH netral memiliki sifat basa sedangkan
nilai pH netral memiliki nilai
pH , bila nilai pH >7 menunjukan zat tersebut
memiliki sifat basa sedangkan
nilai pH < 7 menunjukan derajat kebasaan
tertinggi.
Spesifikasi Sensor Asam
Pada
perencanaa sensor pH yang akan digunakan adalah jenis Elektroda
(SKU : SEN0161) dari DF Robot
dengan spesifikasi sebagai berikut :
- Daya Modul : 5V
- Ukuran Modul : 43mm x 32mm
- Jarak pengukuran : 0-14.0 pH
- Pengukuran Suhu : 0-60 ºC
- Akurasi : ± 0.1pH (25ºC)
- Waktu tanggap : < 1 menit
- Ph Sensor dengan Kabel BNC
- Antarmuka pH 2.0 3 pin
- LED Indikator Data
Prinsip Kerja Sensor Ph
Prinsip kerja
utama sensor pH meter terletak pada probe elektroda kaca (glass electrode)
dengan jalan mengukur jumlah ion H3O+ di dalam larutan. Ujung elektroda kaca
setebal 0,1 mm yang berbentuk bulat (bulb). Bulb ini dipasangkan dengan
silinder kaca non-konduktor atau plastic memanjang diisi dengan larutan HCL.
Didalam larutan HCL, terendam sebuah kawat elektrode panjang berbahan perak
yang pada permukaannya terbentuk senyawa setimbang AgCL,kostantannya jumlah
larutan HCL pada sistem ini membuat electrode Ag/AgCL memiliki nilai potemsial
stabil.
4.
Touch
Sensor

Touch
Sensor atau Sensor Sentuh adalah sensor elektronik yang dapat mendeteksi
sentuhan. Sensor Sentuh ini pada dasarnya beroperasi sebagai sakelar apabila
disentuh, seperti sakelar pada lampu, layar sentuh ponsel dan lain sebagainya.
Sensor Sentuh ini dikenal juga sebagai Sensor Taktil (Tactile Sensor). Seiring
dengan perkembangan teknologi, sensor sentuh ini semakin banyak digunakan dan
telah menggeser peranan sakelar mekanik pada perangkat-perangkat elektronik.
JENIS-JENIS SENSOR SENTUH
Berdasarkan
fungsinya, Sensor Sentuh dapat dibedakan menjadi dua jenis utama yaitu Sensor
Kapasitif dan Sensor Resistif. Sensor Kapasitif atau Capacitive Sensor bekerja
dengan mengukur kapasitansi sedangkan sensor Resistif bekerja dengan mengukur
tekanan yang diberikan pada permukaannya.

Sensor Kapasitif
Sensor sentuh Kapasitif merupakan sensor sentuh yang sangat populer pada
saat ini, hal ini dikarenakan Sensor Kapasitif lebih kuat, tahan lama dan mudah
digunakan serta harga yang relatif lebih murah dari sensor resistif.
Ponsel-ponsel pintar saat ini telah banyak yang menggunakan teknologi ini
karena juga menghasilkan respon yang lebih akurat.
Berbeda dengan Sensor Resistif yang menggunakan tekanan tertentu untuk
merasakan perubahan pada permukaan layar, Sensor Kapasitif memanfaatkan sifat
konduktif alami pada tubuh manusia untuk mendeteksi perubahan layar sentuhnya.
Layar sentuh sensor kapasitif ini terbuat dari bahan konduktif (biasanya Indium Tin Oxide atau disingkat dengan ITO) yang
dilapisi oleh kaca tipis dan hanya bisa disentuh oleh jari manusia atau stylus
khusus ataupun sarung khusus yang memiliki sifat konduktif.
Pada saat jari menyentuh layar, akan terjadi perubahaan medan listrik
pada layar sentuh tersebut dan kemudian di respon oleh processor untuk membaca
pergerakan jari tangan tersebut. Jadi perlu diperhatikan bahwa sentuhan kita
tidak akan di respon oleh layar sensor kapasitif ini apabila kita menggunakan
bahan-bahan non-konduktif sebagai perantara jari tangan dan layar sentuh
tersebut.
Sensor Resistif
Tidak seperti sensor sentuh kapasitif, sensor sentuh resistif ini tidak
tergantung pada sifat listrik yang terjadi pada konduktivitas pelat logam.
Sensor Resistif bekerja dengan mengukur tekanan yang diberikan pada
permukaannya. Karena tidak perlu mengukur perbedaan kapasitansi, sensor sentuh
resistif ini dapat beroperasi pada bahan non-konduktif seperti pena, stylus
atau jari di dalam sarung tangan.
Sensor sentuh resistif terdiri dari dua lapisan konduktif yang dipisahkan
oleh jarak atau celah yang sangat kecil. Dua lapisan konduktif (lapisan atas
dan lapisan bawah) ini pada dasarnya terbuat dari sebuah film. Film-film
umumnya dilapisi oleh Indium Tin Oxide yang merupakan konduktor listrik yang
baik dan juga transparan (bening).
Cara kerjanya hampir sama dengan sebuah sakelar, pada saat film lapisan
atas mendapatkan tekanan tertentu baik dengan jari maupun stylus, maka film
lapisan atas akan bersentuhan dengan film lapisan bawah sehingga menimbulkan
aliran listrik pada titik koordinat tertentu layar tersebut dan memberikan
signal ke prosesor untuk melakukan proses selanjutnya.
Dalam
keadaan IDLE output yang dihasilkan adalah LOW (konsumsi daya sangat kecil)
sedangkan saat ada jari yang menyentuh modul ini output yang dihasilkan adalah
HIGH. Jika tidak ada aktifitas lebih dari 12 detik maka modul otomatis akan
kembali ke mode IDLE (hemat daya).
Modul
dapat dipasang di belakang permukaan plastik, kaca dan bahan non-logam lainnya
untuk menutupi permukaan sensor. Selain itu, jika kita dapat mengatur posisi
yang tepat untuk sentuhan, kita juga dapat menyembunyikannya di dalam dinding,
meja dan bagian tombol tersembunyi lainnya.
Ketika jari menyentuh bagian sensor, modul
menghasilkan sinyal high.
a. Arus Output Pin Sink (@ VCC 3V, VOL 0.6V):
8mA
b. Arus Output pin pull-up (@ VCC=3V,
VOH=2.4V): 4mA
c. Waktu respon (low power mode): max 220ms
1. Dalam keadaan normal, modul menghasilkan
sinyal low (hemat daya).
d. Waktu respon (touch mode): max 60ms Cara
kerja:
4. Dilengkapi 4 lobang baut untuk memudahkan
pemasangan
3. Jika tidak disentuh lagi selama 12 detik
kembali ke mode hemat energi.
Kelebihan: - Konsumsi daya yang rendah
- Dapat menggantikan fungsi saklar tradisional
- Bisa menerima tegangan dari 2 ~ 5.5V D
Rumus Tegangan sentuh maksimal
𝐸𝑆 = 𝐼𝑘( 𝑅𝑘 + 1.5 𝜌𝑠)
Ket: 𝐼𝑘 = Arus fibrilasi
𝑅𝑘 = Nilai tahanan pada badan manusia
𝜌𝑠 = Tahanan Jenis tanah
Grafik respon:


Inti
sensor pH pada permukaan bulbkaca yang memiliki kemampuan untuk bertukar
ion positif (H+) dengan larutan terukur. Kaca tersusun atas molekul silicon
dioksida dengan sejumlah ikatan logam alkali. Pada saat bulb kaca ini terekspos
air, ikatan SiO akan berprotonasi membentuk tipis HsiO+ sesuai dengan reaksi
tersebut.

5. Resistor
Resistor merupakan
komponen elektronika dasar yang digunakan untuk membatasi jumlah arus
yang mengalir dalam satu rangkaian.Sesuai dengan namanya, resistor bersifat
resistif dan umumnya terbuat dari bahan karbon. Resistor memiliki simbol
seperti gambar dibawah ini :

Simbol
Resistor
Resistor
mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di
antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding
lurus dengan arus yang mengalir, berdasarkan persamaan Hukum OHM :

Dimana
V adalah tegangan, I adalah kuat arus, dan R adalah Hambatan.
Di
dalam resistor, terdapat ketentuan untuk membaca nilai resistor yang diwakili
dengan kode warna dengan ketentuan di bawah ini :
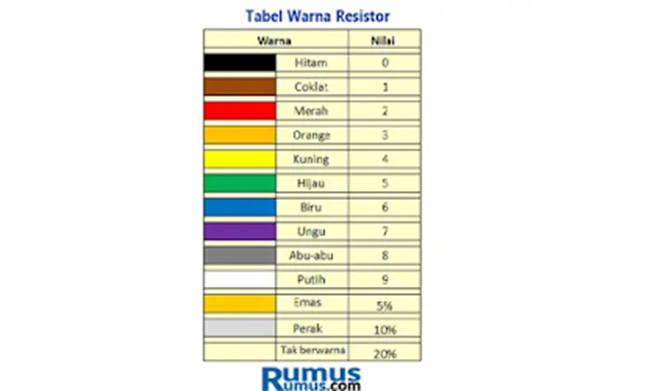

Sebagian
besar resistor yang kita lihat memiliki empat pita berwarna . Oleh karena itu
ada cara membacanya seperti ketentuan dibawah ini :
1.
Dua pita pertama dan kedua menentukan nilai dari resistansi
2.
Pita ketiga menentukan faktor pengali, yang akan memberikan nilai resistansi.
3.
Dan terakhir, pita keempat menentukan nilai toleransi.
Rumus Resistor:
Seri : Rtotal = R1 + R2 + R3 + ….. + Rn
Dimana
:
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
Paralel: 1/Rtotal = 1/R1 + 1/R2 + 1/R3 + ….. + 1/Rn
Dimana
:
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
6. Motor DC

DC Motor adalah
suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau
gerakan (motion).

Pin 1 : Terminal 1
Pin 2: Terminal 2
Catatan: Masing masing terminal jika dipasang terbalik akan
menghasilkan putaran yang terbalik juga
Spesifikasi :

7. Rain Sensor
Sensor hujan adalah jenis sensor yang berfungsi
untuk mendeteksi terjadinya hujan atau tidak, yang dapat difungsikan dalam
segala macam aplikasi dalam kehidupan sehari – hari.
Prinsip kerja dari modul sensor ini yaitu pada saat
ada air hujan turun dan mengenai panel sensor maka akan terjadi proses
elektrolisasi oleh air hujan. Dan karena air hujan termasuk dalam golongan
cairan elektrolit yang dimana cairan tersebut akan menghantarkan arus listrik.
Pada sensor hujan ini terdapat ic komparator yang
dimana output dari sensor ini dapat berupa logika high dan low (on atau off).
Serta pada modul sensor ini terdapat output yang berupa tegangan pula. Sehingga
dapat dikoneksikan ke pin khusus Arduino yaitu Analog Digital Converter. Dengan
singkat kata, sensor ini dapat digunakan untuk memantau kondisi ada tidaknya
hujan di lingkungan luar yang dimana output dari sensor ini dapat berupa sinyal
analog maupun sinyal digital.


{kind=link}
{kind=link}


Berdasarkan grafik di atas kita tahu bahwa semakin banyak intensitas hujan maka
semakin kecil resistansi yang dihasilkan.
8. LCD
Liquid Crystal Display (LCD)
adalah sebuah peralatan elektronik yang berfungsi untuk menampilkan output
sebuah sistem dengan cara membentuk suatu citra atau gambaran pada sebuah
layar. Secara garis besar komponen penyusun LCD terdiri dari kristal cair
(liquid crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter
polarisasi (polarizing filter).

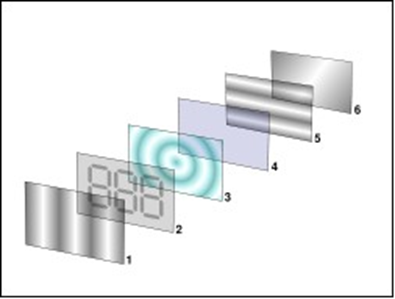
Gambar Penampang komponen
penyusun LCD
Keterangan:
1. Film dengan polarizing filter
vertical untuk memolarisasi cahaya yang masuk.
2. Glass substrate yang berisi
kolom-kolom elektroda Indium tin oxide (ITO).
3. Twisted nematic liquid
crystal (kristal cair dengan susunan terpilin).
4. Glass substrate yang berisi
baris-baris elektroda Indium tin oxide (ITO).
5. Film dengan polarizing filter
horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor cahaya untuk
memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan
mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun layar
sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah memiliki integrated
circuit tersendiri sehingga para pemakai dapat mengontrol tampilan LCD dengan
mudah dengan menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin
input yang sudah tersedia.


9. Motor Servo

Motor servo adalah jenis motor listrik yang dirancang untuk memberikan output yang presisi dalam menyelesaikan pergerakan tertentu. Motor ini dilengkapi dengan kontroler yang memungkinkan presisi tinggi dalam mengatur posisi atau sudut rotor. Prinsip kerja motor servo didasarkan pada umpan balik atau feedback yang terus-menerus dari posisi rotor.
Prinsip kerja motor servo:
1. Umpan Balik (Feedback): Motor servo menggunakan sensor umpan balik, seperti potensiometer, enkoder, atau resolver, untuk terus memonitor posisi atau sudut rotor.
2. Kontroler:
- Kontroler servo
menerima sinyal perintah untuk mencapai posisi tertentu.
- Kontroler
membandingkan posisi aktual (yang diberikan oleh sensor umpan balik) dengan
posisi yang diminta.
3. Error Signal:
- Jika terdapat
perbedaan antara posisi aktual dan yang diminta, tercipta sinyal kesalahan
(error signal).
4. Sinyal Penggerak (Drive Signal):
- Kontroler
menghasilkan sinyal penggerak yang disesuaikan berdasarkan error signal.
- Sinyal penggerak
mengontrol daya yang disuplai ke motor untuk mengoreksi perbedaan posisi.
5. Pergerakan Presisi:
- Motor servo
merespons dengan mengubah posisi rotor untuk mengurangi error posisi.
- Proses ini
berlanjut sampai posisi yang diminta tercapai.
Motor servo sering digunakan
dalam aplikasi yang membutuhkan presisi tinggi, seperti robotika, peralatan CNC
(Computer Numerical Control), peralatan audio profesional, dan banyak lagi.
Keunggulan motor servo meliputi kemampuan untuk mengontrol kecepatan, torsi,
dan posisi dengan sangat presisi, membuatnya ideal untuk aplikasi yang
memerlukan akurasi dan kontrol yang tinggi.
10. Driver Motor
L293D
IC L293D adalah IC yang didesain khusus
sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun
mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat
dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver
L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC
L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan
kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan
untuk membuat driver H-bridge untuk 2 buah motor DC. Konstruksi pin driver
motor DC IC l293D adalah sebagai berikut.
Konstruksi Pin Driver Motor DC IC L293D
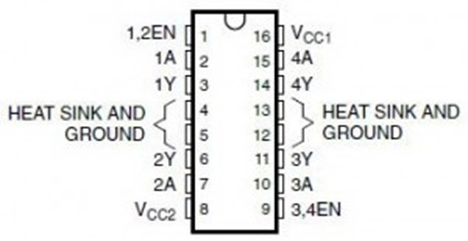
Fungsi
Pin Driver Motor DC IC L293D
1.
Pin EN
(Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah
untuk menggerakan motor DC.
2.
Pin In
(Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC
3.
Pin Out
(Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang
dihubungkan ke motor DC
4.
Pin VCC
(VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1
adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah
jalur input sumber tegangan untuk motor DC yang dikendalikan.
5.
Pin GND
(Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah
yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
Feature
Driver Motor DC IC L293D Driver motor DC IC L293D memiliki feature yang lengkap
untuk sebuah driver motor DC sehingga dapat diaplikasikan dalam beberapa teknik
driver motor DC dan dapat digunakan untuk mengendalikan beberapa jenis motor
DC. Feature yang dimiliki driver motor DC IC L293D sesuai dengan datasheet
adalah sebagai berikut :
· -
Wide Supply-Voltage Range: 4.5 V to 36 V
· -
Separate Input-Logic Supply
· -
Internal ESD Protection
· -
Thermal Shutdown
· - High-Noise-Immunity
Inputs
-
Functionally Similar to SGS L293 and SGS L293D
· - Output
Current 1 A Per Channel (600 mA for L293D)
·
- Peak Output Current 2 A Per Channel (1.2 A for L293D)
· -
Output Clamp Diodes for Inductive Transient Suppression (L293D)
Rangkaian Aplikasi Driver Motor DC IC L293D

Pada gambar driver IC L293D diatas adalah contoh aplikasi dari keempat unit
driver motor DC yang dihubungkan secara berbeda sesuai dengan keinginan dan
kebutuhan.
1. 1. Persiapan Komponen
- Hubungkan sensor water level ,rain sensor , touch sensor, pH sensor,
dan sensor suhu , ke Arduino Master
- Hubungkan LCD Display, driver motor L293D, motor servo, dan buzzer sesuai
Program ke Arduino Slave
- Hubungkan pompa air ke L293D dan baterai.
2. 2. Unggah Kode
Upload kode
Arduino Master dan kode Arduino Slave
3. 3. Pengujian
Verifikasi
fungsi masing-masing sensor dan aktuator:
- Water Level : Uji kontrol pompa. dan pembacaan serta tampilan di LCD
- Rain Sensor : Uji aktivasi buzzer.
- Touch Sensor : Uji kontrol motor servo.
- pH : Uji kontrol motor servo dan pembacaan serta tampilan di LCD
- Suhu : Cek pembacaan dan tampilan di LCD.
4. 4. Uji Integrasi
Jalankan
sistem penuh, simulasikan kondisi lingkungan, dan periksa respon keseluruhan.



1. Pada demo projek yang bertujudul Sistem Kontrol Budidaya Ikan lele ini mengunakan beberapa komponen baik itu sensor ataupun actuator. Prinsip kerja dari rangkaianya seperti berikut
1. 1. Sensor Touch.
Sensor touch berfungsi untuk memberi pakan otomatis untuk lele dimana dengan output berupa motor servo yang bergerak dengan dejarat tertentu sehinga kotak pakan atau tempat pakan dari ikan lele otomatis terbuka atau tertutup tergantung aktif atau tidaknya sensor. Prinsip kerjanya yaitu : Jika Touch sensor berlogika 1 maka Motor Servo akan berputar 90 derajat sehingga tempat pakan terbuka secara otomatis dan, jika Touch sensor berlogika 0 maka Motor Servo akan kembali seperti semula atau posisi awal dan tempat pakan tertutup.
2. 2. Sensor Rain
Sensor Rain berfungsi untuk medeteksi adanya kebocaran pada kolam ikan lele dengan ditandai dengan ada bunyi dari buzzer. Dimana jika Rain sensor berlogika 1 atau air mengenai rain sensor maka rain sensor akan medeteksi adanya kebocoran dan mengirimkan sinyal ke Arduino slave dan Arduino mengirimkan output ke buzzr yang akan menghidupkan buzzer sesuai yang telah deprogram dan Jika Rain sensor berlogika 0 maka buzzer akan mati yang berarti tidak ada kebocoran pada kolam lele
3. 3.Water level
Water level berfungsi untuk mengukur ketiggian dari air kolam dari ikan lele. Dimana jika air tidak berada pada ketinggian yang telah di program makan akan menghindupkan motor yang menandakan pompa air akan hidup otomatis. Prinsip kerjanya yaitu jika Water Level sensor mendeteksi air melewati ambang batas yang ditentukan, maka menghidupkan Pompa otomatis sehingga air pada kolam terisi kembali dan pada tampilan LCD akan menuliskan Ketinggian air yang dideteksi atau menampilkan “air habis”. Jika Water sensor mendeteksi air tidak melewati ambang batas maka pompa air akan mati dan pada tampilan LCD akan menampilkan “air cukup” yang mendakan ketinggian air kolam ikan sudah cukup atau sudah terpenuhi sesuai program. Dimana pada program nilai ambang batas atau threshold yang kita atur yaitu 150 dimana jika kecil dari 150 maka air habis atau menghidupkan motor dan sebaliknya.
4. 4.Sensor Ph
Sensor Ph pada system ini berfungsi untuk mendeteksi tingkat ph air dari kolam lele dimana dengan prinsip kerja : jika pH sensor mendeteksi pH melebihi ambang batas normal atau besar dari 7 (bersifat basa) maka motor Servo akan berputar 90 derajat dan pada tampilan LCD akan menuliskan nilai dari pH yang terdeteksi. Jika pH sensor mendeteksi pH kurang dari ambang batas normal atau kecil dari 6 (bersifat asam )maka Motor Servo akan berputar 45 derajat dan pada tampilan LCD akan menuliskan nilai dari pH yang terdeteksi. Jika pH sensor mendeteksi pH di batas Normal maka Motor Servo akan ke posisi semula dan pada tampilan LCD akan menuliskan nilai dari pH yang terdeteksi.
5. 5.Sensor Suhu (DS18b20)
Sensor pada system berfungsi untuk menentukan nilai suhu pada air kolam lele. Dimana Jika sensor Suhu mendeteksi suhu diatas ambang batas (besar dari 27 C) maka motor DC akan berputar untuk menggerakkan sliding net ke posisi menutupi kolam serta pada tampilan LCD akan menunjukkan suhu yang di deteksi oleh sensor. jika sensor suhu mendeteksi suhu normal dan kebawahnya, maka motor DC akan berputar untuk menggerakkan sliding net ke posisi terbuka serta pada tampilan LCD akan menunjukkan suhu yang dideteksi oleh sensor.

SLAVE

File Rangkaian Klik Disini
HTML File Klik Disini
DataSheet PH Sensor Klik Disini
DataSheet Water Sensor Klik Disini
DataSheet Suhu Sensor Klik Disini
DataSheet Rain Sensor Klik Disini
DataSheet Touch Sensor Klik Disini
DataSheet Motor DC Klik disini
DataSheet Motor Servo Klik disini
DataSheet LCD Klik disini
DataSheet Arduino Uno Klik disini
DataSheet Baterai Klik Disini
DataSheet L293D Klik Disini
library ph sensor Klik disini
library waterlevel Klik disini
library touch sensor Klik disini
library rain sensor Klik disini
Video Simulasi Klik Disini
Video Demo Klik Disini
No comments:
Post a Comment